20.2 Bifurcations with systems of equations
As another example, let’s determine the behavior of solutions near the origin for the system of equations: \[\begin{equation} \frac{\vec{dx}}{dt} = \begin{pmatrix} 3 & b \\ 1 & 1 \end{pmatrix} \vec{x}. \tag{20.1} \end{equation}\]
Let’s take a look at the phase plane with solution curves.
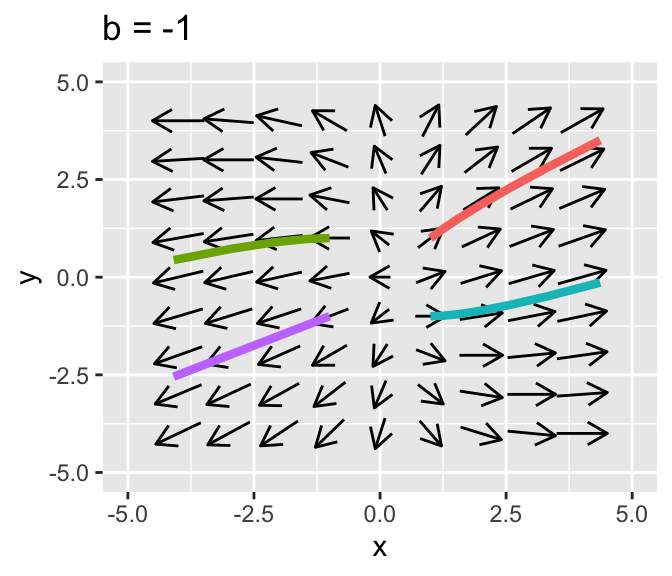
Figure 20.5: Comparison of two phase planes for Equation (20.1)
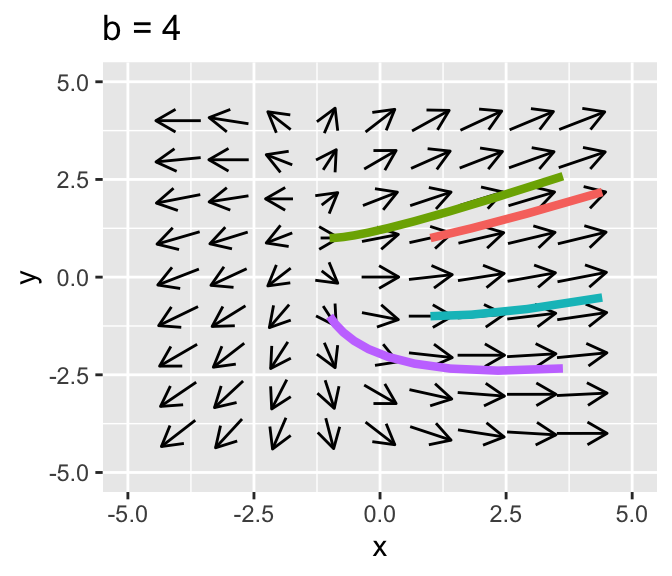
Figure 20.6: Comparison of two phase planes for Equation (20.1)
This equation has one free parameter \(b\) that we will analyze using the trace determinant conditions developed in Section 19. Let’s call the matrix \(A\), so the tr\((A)=4\) and \(\det(A)=3-b\). Since the trace is always positive either it will be a saddle if the \(\det(A)<0\), or when \(3<b\). We have a unstable spiral when \(3>b\) and \((\mbox{tr}(A))^2-4 \det(A)<0\), or when \(4^2-4\cdot(3-b) = 16-12+4b = 4+4b<0\), which leads to \(b<-1\). Notice this is a contradictory condition - we have already assumed \(b>3\), so we will not have any unstable spirals.
To summarize, we have the following dynamics:
- When \(b<3\) the equilibrium solution will be a saddle.
- When \(b=3\) we will have an unstable solution.
- When \(b>3\) we will have a unstable node.
The benefit of a bifurcation diagram is that is provides a complete understanding of the dynamics of the system as a function of the parameters. In this section we examined one-parameter bifurcations (for example we looked the stability of the equilibrium solution as it depends on c or b), but bifurcations can also be extended further to two parameter bifurcation families, applying similar methods. In general the methods are similar to what we have done.